
Mouad Boumediene | Postdoctoral Researcher
I focus on developing multi-robot coordination approaches using Deep RL, with an interest in advanced pathfinding and Industry 4.0 applications.
Curriculum Vitae [PDF]News
Experience
Postdoctoral Researcher, UAS drone center (MMMI) – University of Southern Denmark 2023 – 2024
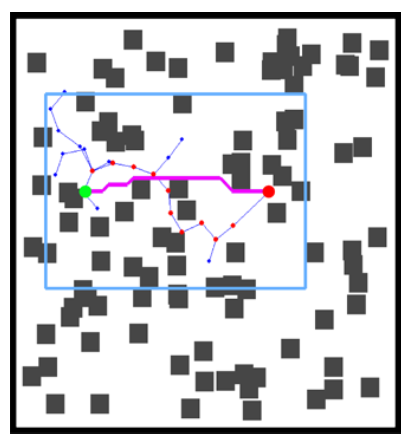
- Developed HM‑DRL: a deep‑RL approach for distributed multi‑agent pathfinding.
- Worked on “Swarm Robotics for Industry 4.0” (Independent Research Fund Denmark grant 0136‑00251B).
- Built Relocation‑MAPF: a relocation strategy to reduce bottlenecks in dense MAPF environments.
Robotics Researcher (PhD Internship), MMMI – University of Southern Denmark Feb 2023
- Applied deep RL techniques to AMR swarms in Industry 4.0 settings.
- Contributed to the “Swarm Robotics” project under grant 0136‑00251B.
Robotics Engineer (Freelance), AiGro Netherlands 2021 – 2022
- Designed a 2D simulator for pathfinding and localization algorithm development.
- Implemented Kalman‑filter based sensor fusion using IMU and GPS data.
Temporary Lecturer, University of 20 Août 1955 – Skikda 2019 – 2022
- Taught advanced signal processing and digital regulation labs/tutorials.
- Supervised Master’s students’ final‑year projects.
Publications
Journal Papers / Conference Proceedings / Preprint
1.
Journal
HM‑DRL: Enhancing multi‑agent pathfinding with a heatmap‑based heuristic for distributed deep reinforcement learning
Applied Intelligence, vol. 55, p. 873, 2025.
3.
Conference
Gen4jectory algorithm – 4‑d trajectory planning with minimised flight time for multiple rotary‑wing UAVs
IMAV2024‑25; Sep 2024, pp. 242–252.
4.
Conference
Unicycle mobile robot control using neural model predictive controller
ICTAEE'23, Skikda, Algeria, May 2023, pp. 110–117.
URL: drive.google.com/...
5.
Conference
Design, simulation and control of a self-balancing robot in a gazebo environment and ROS 2 framework
ICTAEE, Skikda, Algeria, May 2023, pp. 98–103.
URL: drive.google.com/...
6.
Conference
Design, construction, and control of a self-balancing robot including a new frame assembly approach and a custom PCB
ICTAEE, Skikda, Algeria, May 2023, pp. 200–206.
URL: drive.google.com/...
2.
Journal
FDA*: A Focused Single‑Query Grid Based Path Planning Algorithm
JAMRIS, pp. 37–43, May 2022.