Design, construction, and control of a self-balancing robot including a new frame assembly approach and a custom PCB
Authors: M. Boumediene, N. Zeghida, B. Manaa & D. L. Mehennaoui
Published: | Journal: ICTAEE, , pp. 200–206
Abstract
In the rapidly advancing field of robotics, the design and assembly of robotic components play a crucial role in both the performance and efficiency of the system. This paper introduces a novel approach in the development of a self- balancing robot, with a special focus on the innovative chassis design and an Arduino Mega shield for component mounting. The primary objective of this design is to reduce the complexity typically associated with the wiring of robotic components, thereby improving the ease of assembly, maintenance, and overall reliability of the system.
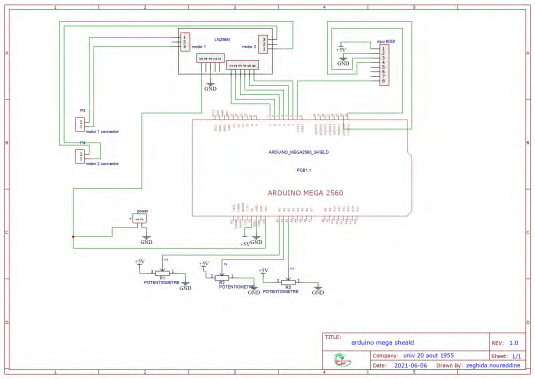
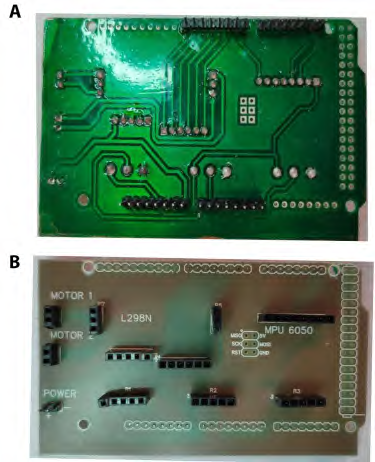
The proposed chassis design optimizes the robot’s balance and stability while ensuring a compact and robust structure. The Arduino Mega shield, on the other hand, effectively eliminates the common problem of wire nesting, streamlining the assembly process and minimizing potential errors. Experimental results indicate that the proposed design pro- vides enhanced performance compared to conventional self- balancing robots.
Further, this design approach opens new doors for the development of more efficient and user
Gallery



Citation
@inproceedings{Boumediene2023SelfBalancingFrame,
title = {Design, construction, and control of a self-balancing robot including a new frame assembly approach and a custom PCB},
author = {Mouad Boumediene and N. Zeghida and B. Manaa and D. L. Mehennaoui},
booktitle = {Proceedings of the International Conference on Technological Advances in Electrical Engineering (ICTAEE)},
pages = {200--206},
year = {2023},
address = {Skikda, Algeria}
}