Design, simulation and control of a self-balancing robot in a Gazebo environment and ROS 2 framework
Authors: M. Boumediene, S. Laouar, D. L. Mehennaoui & P. S. Ouchtati
Published: | Journal: ICTAEE, , pp. 98–103
Abstract
Abstract—Self-balancing robots are mobile machines that can maintain their balance while moving on just two (or even one) wheels. Their potential applications across a wide range of industries have increased their popularity. A self-balancing robot, however, can be time- and money-consuming to make.
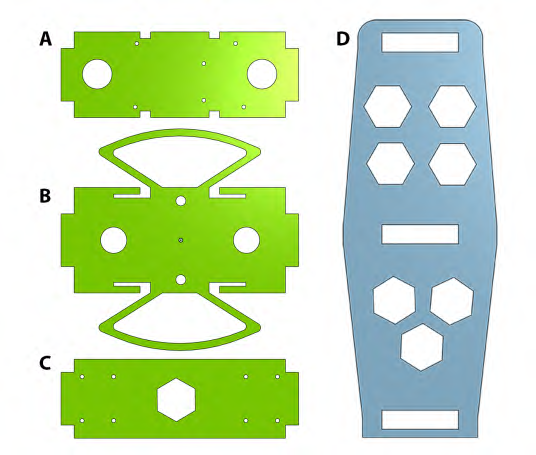
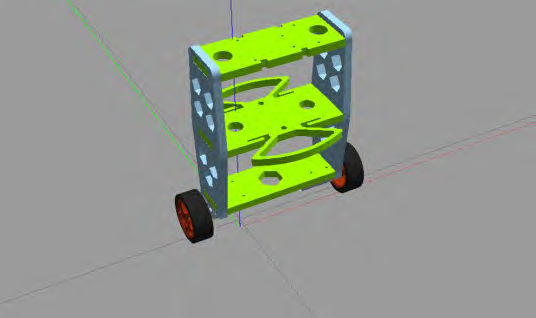
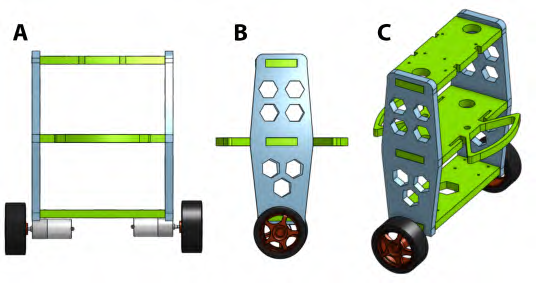
Therefore, by simulating the robot before it is built, the design and development of such as system can be done more effectively. In this paper, we will demonstrate the design and simulation of a self-balancing robot using Onshape, ROS-2, and Gazebo. We outline the design process of the robot chassis in Onshape and explain how to use this 3D CAD design in order to simulate a realistic model of the self-balancing robot in Gazebo.
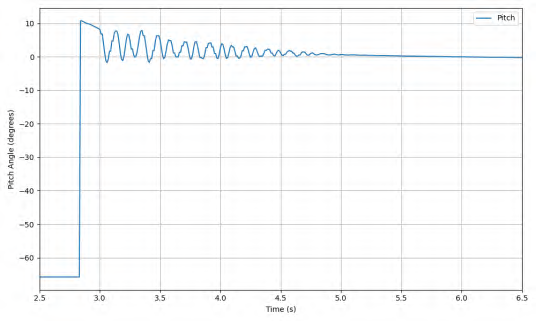
Our work highlights the importance of simulating self-balancing robots before fabrication and demonstrates the power and flexibility of ROS2 and Gazebo for designing and simulating complex robotic systems.
Gallery
Citation
@inproceedings{Boumediene2023GazeboROS2,
title = {Design, simulation and control of a self-balancing robot in a Gazebo environment and ROS 2 framework},
author = {Mouad Boumediene and S. Laouar and D. L. Mehennaoui and P. S. Ouchtati},
booktitle = {Proceedings of the International Conference on Technological Advances in Electrical Engineering (ICTAEE)},
pages = {98--103},
year = {2023},
address = {Skikda, Algeria}
}