Unicycle mobile robot control using neural model predictive controller
Authors: C. Bellel, L. Mehennaoui, F. Bouchareb & M. Boumediene
Published: | Journal: ICTAEE'23, , pp. 110–117
Abstract
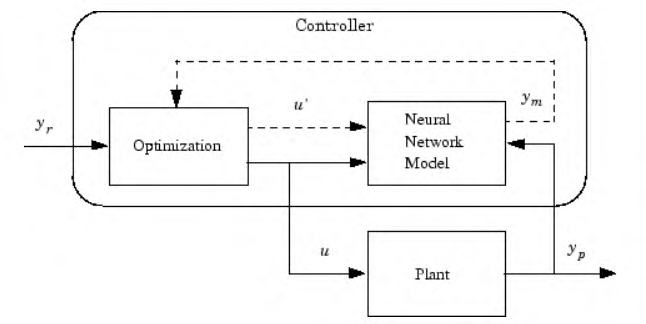
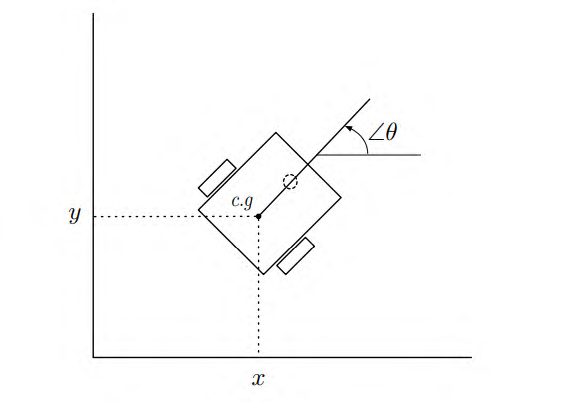
Among the common control methods in robotics domain nowadays we find Predictive Control, which is one of only a few advanced control methods that are used successfully in industrial control applications. In this paper, a unicycle mobile robot control is achieved using the Model Predictive Control (MPC) based on neural networks. In order to show the suitability of the proposed control approach, a simulation and results are provided using MATLAB-Simulink.
Gallery
Citation
@inproceedings{Bellel2023UnicycleNMPC,
title = {Unicycle mobile robot control using neural model predictive controller},
author = {C. Bellel and L. Mehennaoui and F. Bouchareb and M. Boumediene},
booktitle = {Fourth International Conference on Technological Advances in Electrical Engineering (ICTAEE'23)},
pages = {110--117},
year = {2023},
address = {Skikda, Algeria}
}