Gen4jectory algorithm–4-D trajectory planning with minimised flight time for multiple rotary-wing UAVs
Authors: I. Panov, M. Boumediene, H. Midtiby & K. Jensen
Published: | Journal: 15th ANNUAL INTERNATIONAL MICRO AIR VEHICLE CONFERENCE AND COMPETITION, ,
Abstract
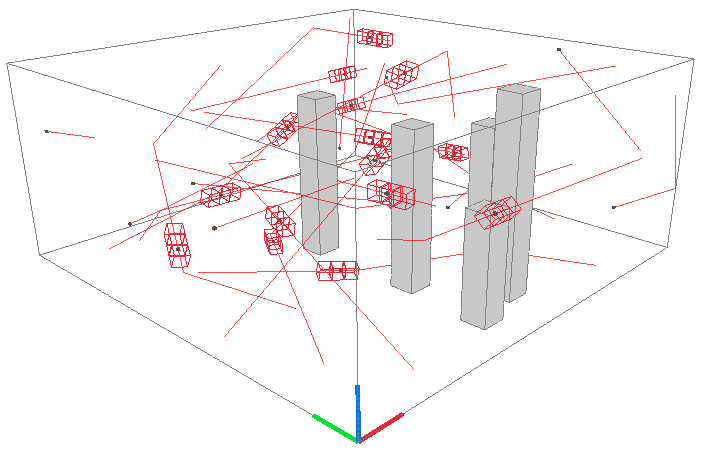
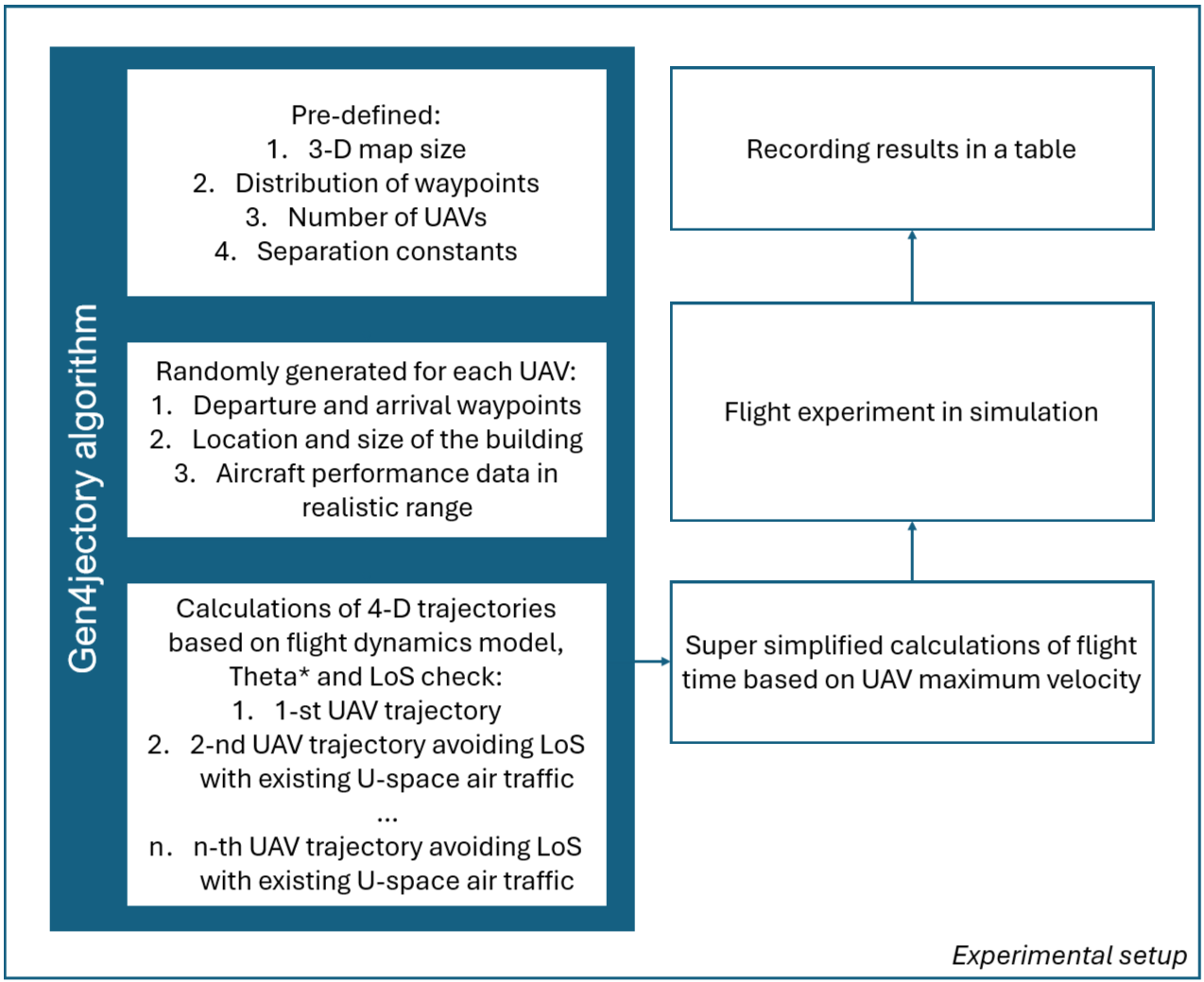
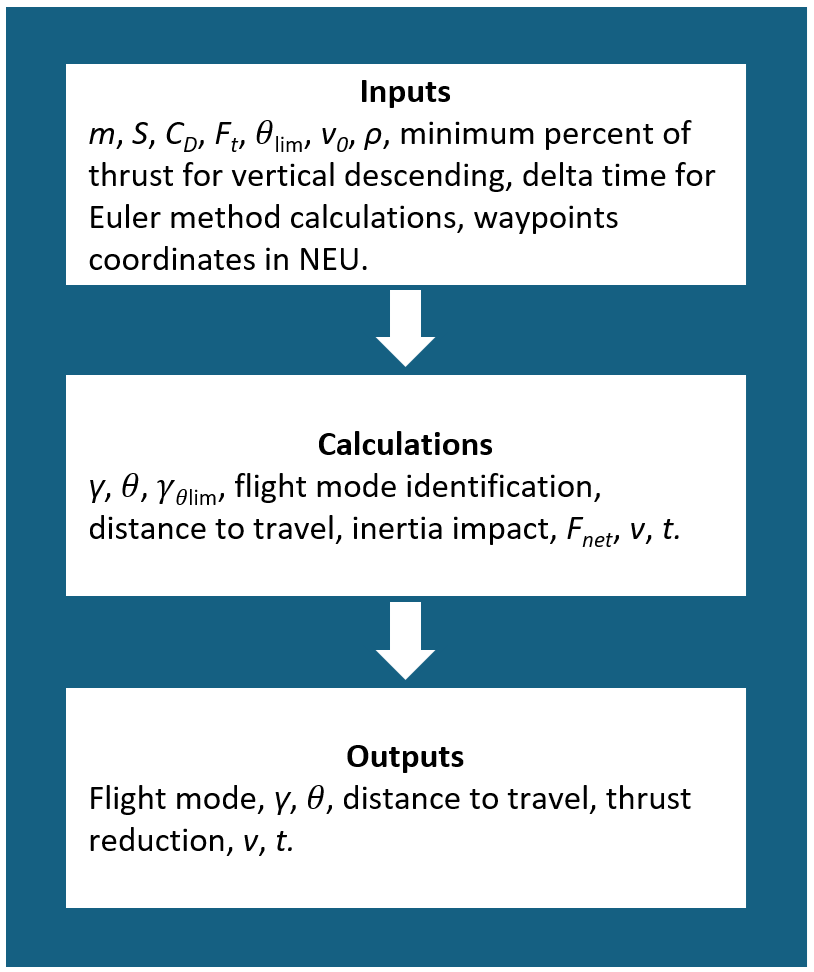
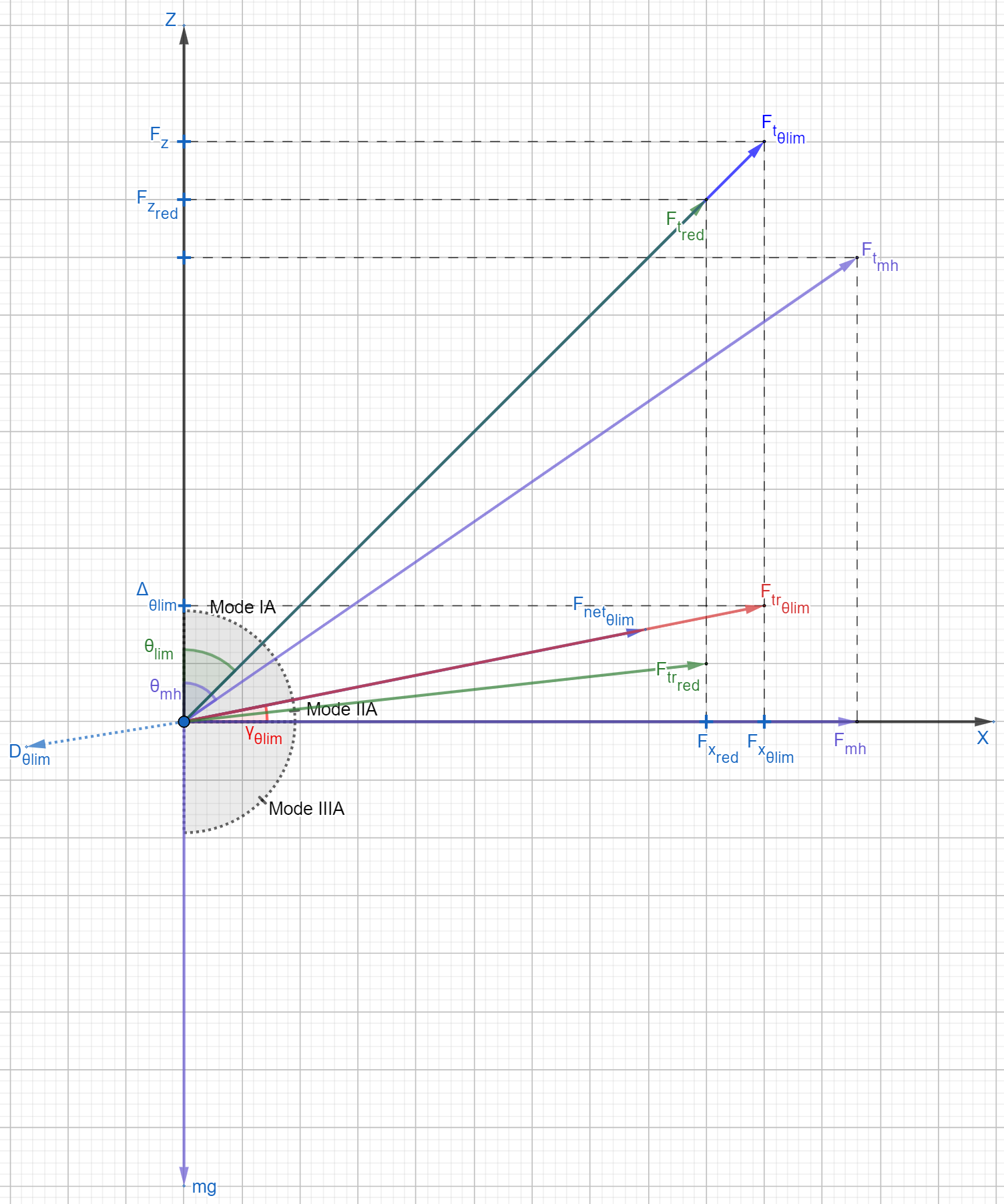
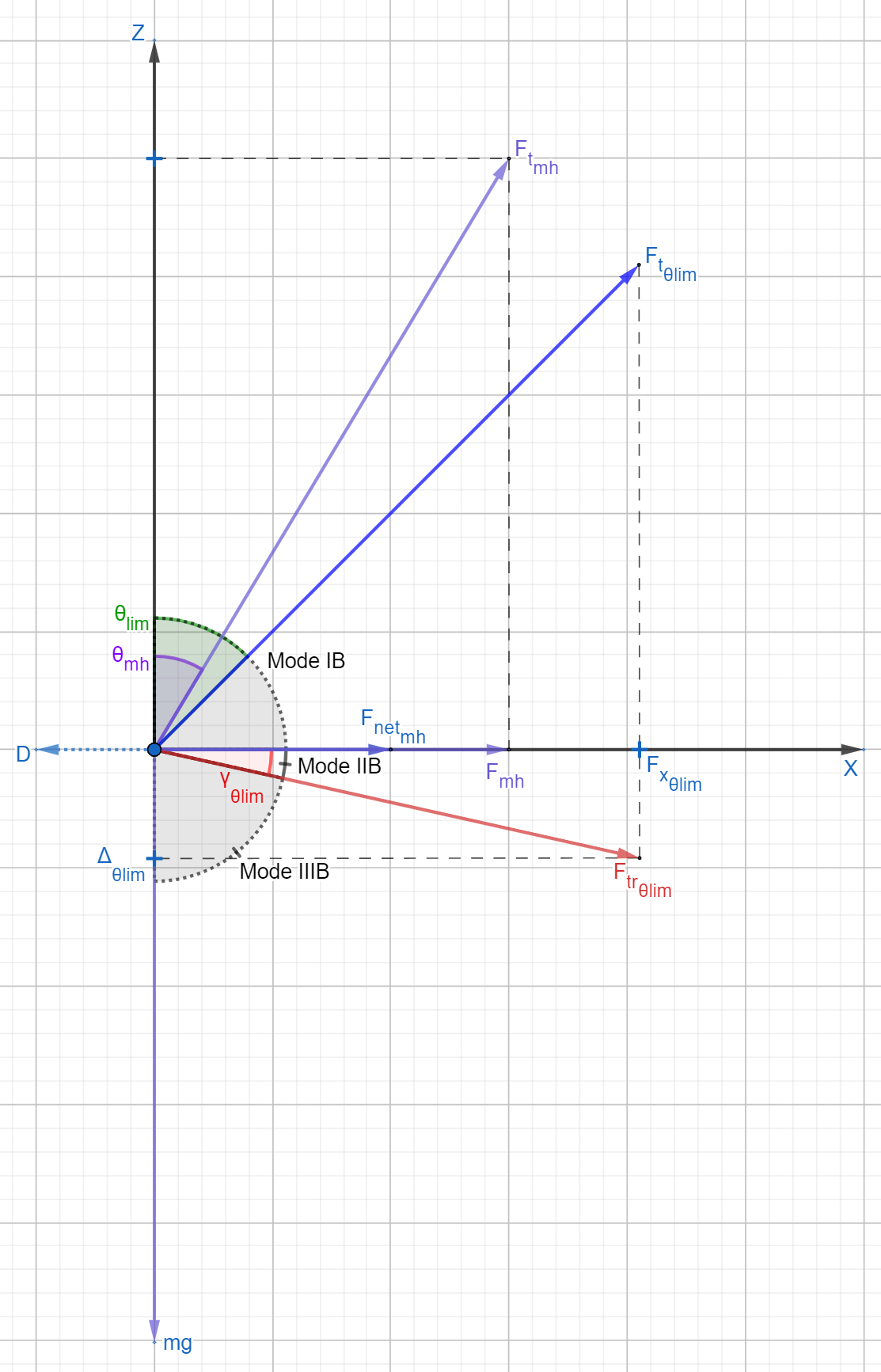
The paper proposes an innovative Gen4jectory algorithm that allows planning multiple 4-D trajectories considering unique aircraft performance data of the uncrewed rotary-wing air traffic. The algorithm guarantees zero cases of Loss of Separation (LoS). We describe the physical model of drone (Unmanned Aerial Vehicle (UAV)) motion, map representation, pathfinding technique, 4-D trajectory planning, check of LoS, experimental setup and simulation results.
Finally, we discuss the promising ways of further
Gallery
Video
Citation
@inproceedings{Panov2024Gen4jectory,
title = {Gen4jectory algorithm–4-D trajectory planning with minimised flight time for multiple rotary-wing UAVs},
author = {Ivan Panov and Mouad Boumediene and Henrik Midtiby and Kjeld Jensen},
year = {2024}
}