HM-DRL: Enhancing multi-agent pathfinding with a heatmap-based heuristic for distributed deep reinforcement learning.
Authors: M. Boumediene, A. Maoudj & A. L. Christensen
Published: | Journal: Applied Intelligence, Vol. 55, pp. 873
Abstract
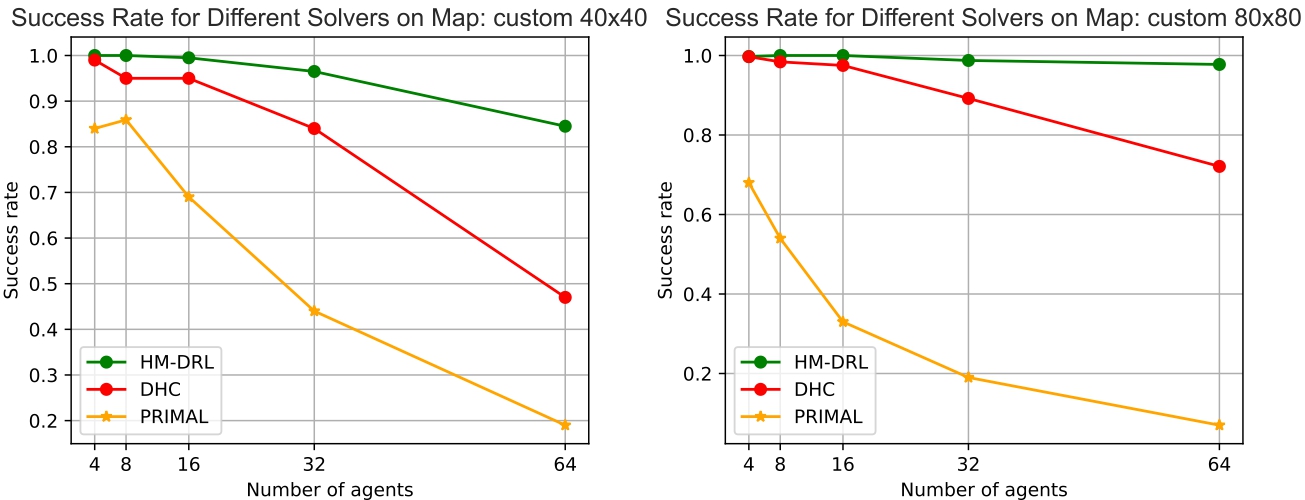
The integration of mobile robots into industrial environments, particularly in warehouse logistics, has led to an increasing need for efficient Multi-Agent Pathfinding (MAPF) solutions. These solutions are crucial for coordinating large fleets of robots in complex operational settings, yet several existing methods struggle with scalability issues in densely populated environments. Additionally, many existing learning-based approaches are computationally expensive and require excessive training time.
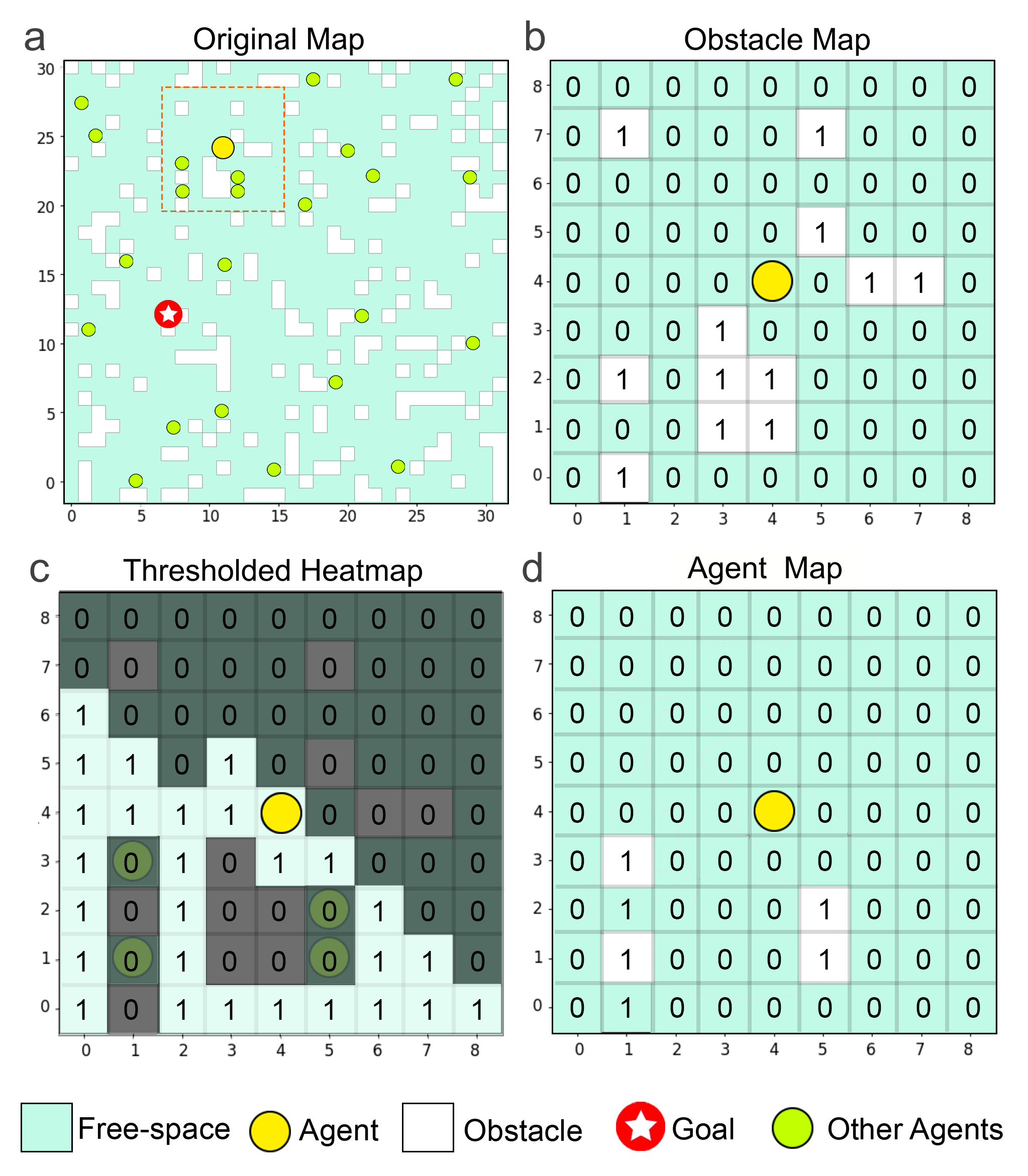
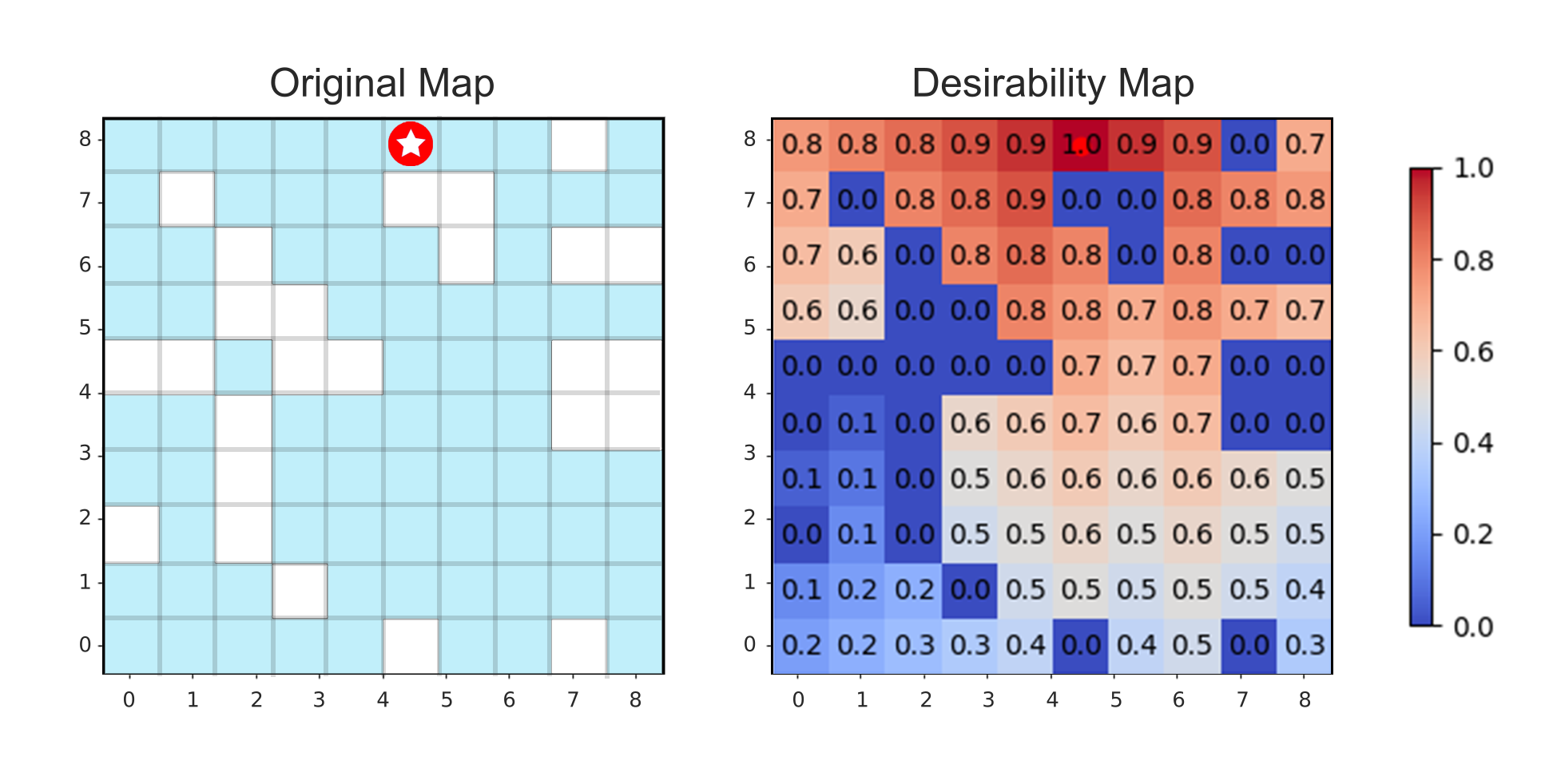
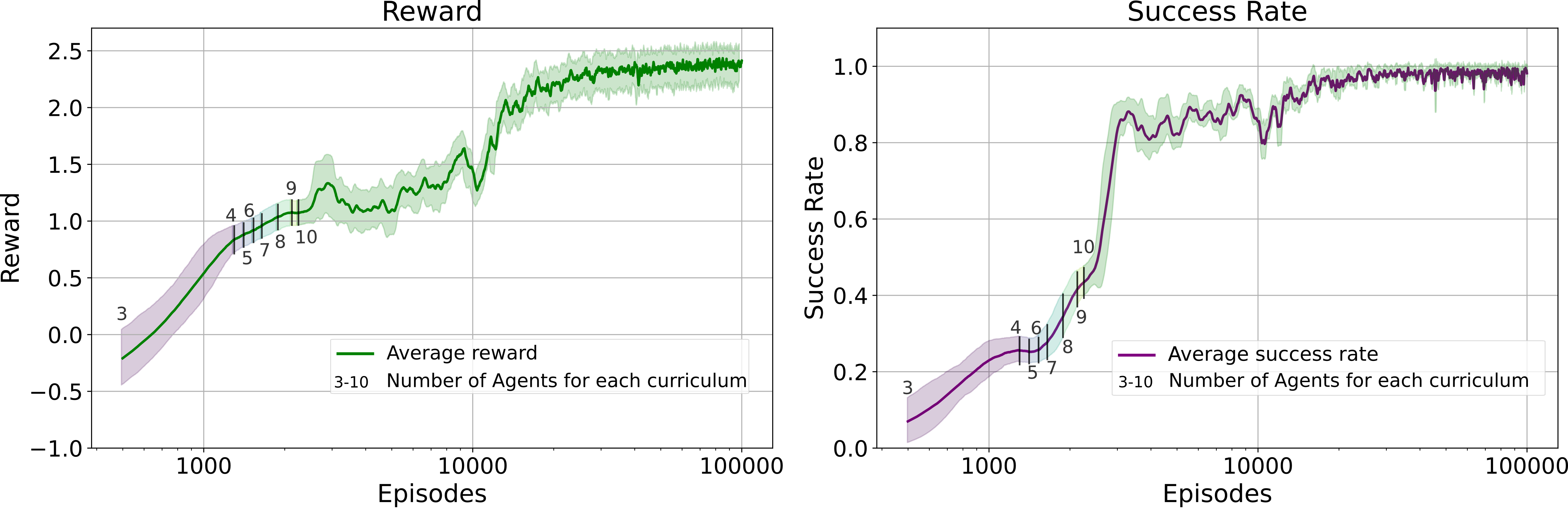
In this paper, we propose a Deep Reinforcement Learning (DRL)-based approach that exploits on the strengths of DRL and graph-convolutional communication to efficiently coordinate fleets of mobile robots with limited communication range in partially observable environments. We introduce a novel heatmap-based heuristic that reduces the observation space while retaining the critical information needed for effective path …
Gallery

Video
Citation
@article{Boumediene2025HMDRL,
title = {HM-DRL: Enhancing multi-agent pathfinding with a heatmap-based heuristic for distributed deep reinforcement learning.},
author = {Mouad Boumediene and Abderraouf Maoudj and Anders Lyhne Christensen},
journal = {Applied Intelligence},
publisher = {Springer US},
volume = {55},
number = {12},
pages = {873},
year = {2025}
}